32 KiB
Stand-Alone Integration Library
Contents
- Introduction
- class Integrator
- typedef DerivsFunc
- class FirstOrderODEIntegrator
- typedef RootErrorFunc
- class FirstOrderODEVariableStepIntegrator
- class EulerIntegrator
- class HeunsMethod
- class RK2Integrator
- class RK4Integrator
- class RK3_8Integrator
- class EulerCromerIntegrator
- class ABM2Integrator
- class ABM4Integrator
- enum SlopeConstraint
- class RootFinder
Introduction
The Stand-Alone Integration Library can be used within a Trick simulation, or independent of it.
Some examples of using these integrators can be found in the examples/ directory.
- CannonBall uses the RK2Integrator.
- MassSpringDamper uses the EulerCromerIntegrator.
- Orbit uses the EulerCromerIntegrator.
- DoubleIntegral shows an example of a double integral.
class Integrator
Description
This base-class represents a numerical integrator.
Data Members
| Member | Type | Access | Description |
|---|---|---|---|
| X_in | double |
Protected | Independent variable value of the input state. |
| X_out | double |
Protected | Independent variable value of the output state. |
| default_h | double |
Protected | Default integration step-size |
| user_data | void* |
Protected | A pointer to user defined data that will be passed to user-defined functions when called by the Integrator. |
Constructor
Integrator(double h, void* udata);
| Parameter | Type | Description |
|---|---|---|
| h | double |
Default integration step-size |
| udata | void* |
A pointer to user defined data that will be passed to user-defined functions when called by the Integrator. |
Destructor
virtual ~Integrator() {}
Public Member Functions
virtual void step()
Derived classes should override this method to perform a numeric integration step, and then call advanceIndyVar() to advance the independent variable. The default behavior of this member-function is to call advanceIndyVar().
virtual void load()
Derived classes should override this method to load/prepare the integrator for the next integration step. The default behavior is to set the input value of the independent variable to its previous output value, i.e, X_in = X_out.
virtual void unload()
Derived classes should override this method to disseminate the values of the output state to their respective destinations. The default behavior is to do nothing.
virtual void integrate()
Call load(), step(), and unload() in order.
virtual double undo_integrate()
Derived classes should override this member function to undo the effect of integrate() and return that last step-size. The behavior of this function is to set the output value of the independent variable to its previous input value, i.e, X_out = X_in, and then return the default step-size default_h.
double getIndyVar()
Returns the value of the independent variable (i.e, the variable over which you are integrating) If you are integrating over time, this value will be the accumulated time.
double setIndyVar( double t)
Sets the value of the independent variable. (i.e, the variable over which you are integrating) If you are integrating over time, this will be the accumulated time.
Protected Member Functions
void advanceIndyVar()
This member function advances the independent variable by the default integration step-size.
typedef DerivsFunc
Description
This typedef defines a type of C/C++ function whose purpose is to populate a state derivative array.
typedef void (*DerivsFunc)( double x, double state[], double derivs[], void* udata);
where:
| Parameter | Type | Direction | Description |
|---|---|---|---|
| x | double |
IN | Independent variable. |
| state | double* |
IN | Array of state variable values. |
| derivs | double* |
OUT | Array into which derivatives are to be returned. |
| udata | void* |
IN | Pointer to user_data. |
Example
void my_derivs( double t, double state[], double deriv[], void* udata) { ... }
class FirstOrderODEIntegrator
Derived from Integrator.
Description
This class represents an integrator for a first order Ordinary Differential Equation.
Data Members
Those inherited from Integrator plus:
| Member | Type | Access | Description |
|---|---|---|---|
| state_size | unsigned int |
Protected | Size of the state vector. |
| inState | double* |
Protected | Input state vector to the integrator. |
| outState | double* |
Protected | Output state vector from the integrator. |
| inVars | double** |
Protected | Array of pointers to the variables from which input state vector values are copied. |
| outVars | double** |
Protected | Array of pointers to the variables to which output state vector values are copied. |
| derivs_func | DerivsFunc |
Protected | Function thats generates the function (an array of state derivatives) to be integrated. |
This class introduces:
- Input and output state arrays.
- A function that calculates state-derivatives for the integration algorithm.
- Array of pointers to variables from which to load the input state array, and array of pointers to variables to which to unload the output state array.
Constructor
FirstOrderODEIntegrator( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data);
where:
| Parameter | Type | Description |
|---|---|---|
| h | double |
Default integration step-size. |
| N | int |
Number of state variables to be integrated |
| in_vars | double* |
Array of pointers to the state variables from which we load() the integrator state (in_vars and out_vars will generally point to the same array of pointers.) |
| out_vars | double* |
Array of pointers to the state variables to which we unload() the integrator state (in_vars and out_vars will generally point to the same array of pointers.) |
| derivs_func | DerivsFunc |
Function thats generates the function (the derivatives) to be integrated. |
| user_data | void* |
A pointer to user defined data that will be passed to a DerivsFunc when called by the Integrator. |
Public Member Functions
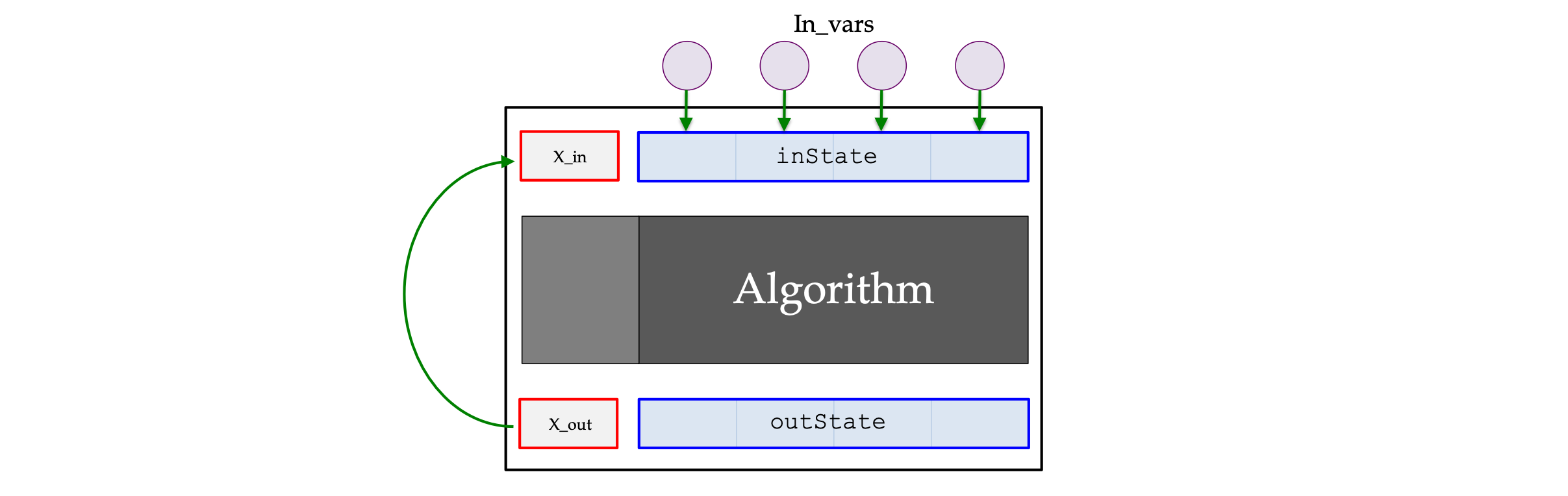
void load()
Overrides Integrator::load()
Load the integrator's initial state from the variables specified by in_vars. Set the initial value of the independent variable for the next step to the final value of the previous step.
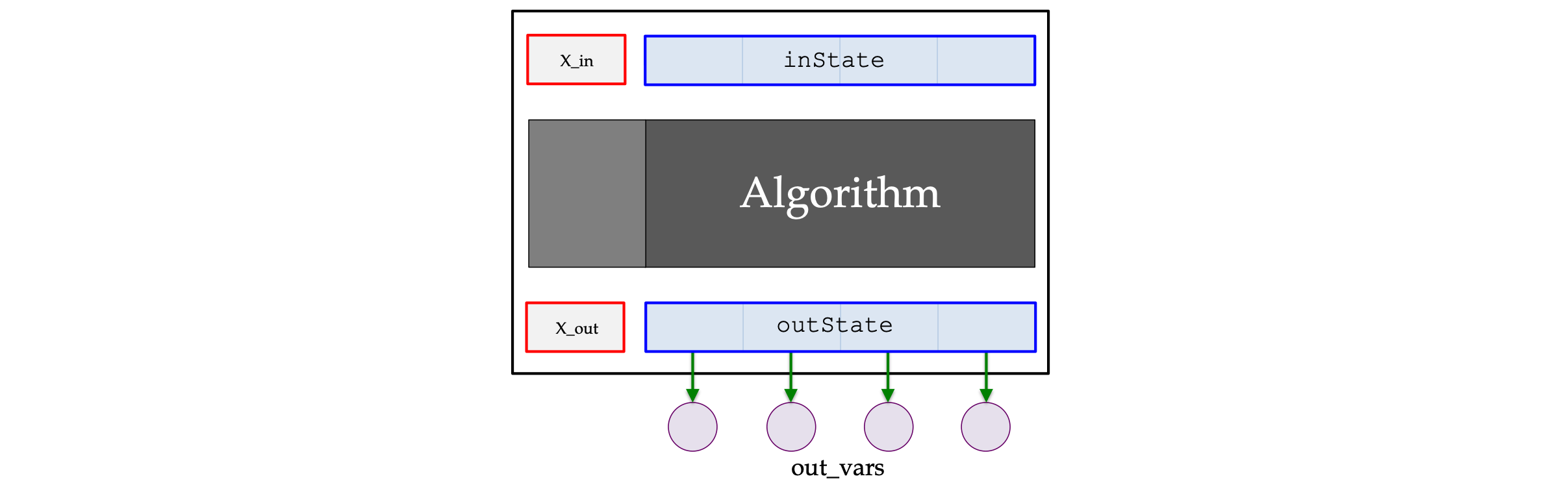
void unload()
Overrides Integrator::unload()
Unload the integrator's result state to the variables specified by out_vars.
virtual void step()
Overrides Integrator::step()
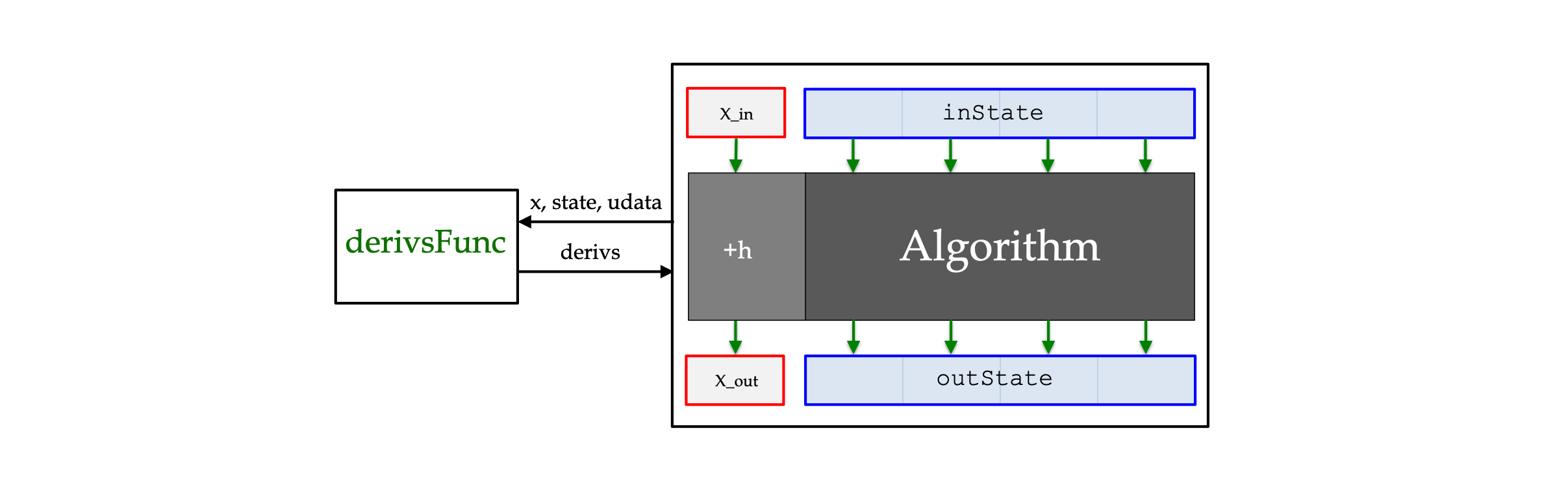 Derived classes should override this method to calculate
Derived classes should override this method to calculate outState using some integration algorithm, using X_in, inState, and derivs_func, and default_h. The over-riding method should also pass the user_data when calling the DerivsFunc. The default algorithm is Euler.
void integrate()
Inherited from Integrator::integrate()
virtual void undo_integrate()
Overrides Integrator::undo_integrate()
Undo the effect of the last integration step.

void load_from_outState()
Load inState from outState, rather than from the variables referenced by in_vars.

double** set_in_vars( double* in_vars[])
This function specifies the variables from which inState values are to be copied, when load() is called. The number of elements in this array must equal the number of state variables. Return a pointer to the previous array so that it can be deleted if necessary.

double** set_out_vars( double* out_vars[])
This function specifies the variables to which outState values are to be copied, when unload() is called. The number of elements in this array must equal the number of state variables. Return a pointer to the previous array so that it can be deleted if necessary.

double getIndyVar()
Inherited from Integrator::getIndyVar()
double setIndyVar()
Inherited from Integrator::setIndyVar()
Protected Member Functions
advanceIndyVar()
Inherited from Integrator::advanceIndyVar()
typedef RootErrorFunc
Description
This typedef defines a type of C/C++ function whose purpose is to specify the job of a RootFinder.
typedef double (*RootErrorFunc)( double x, double state[], RootFinder* root_finder, void* udata);
where:
| Parameter | Type | Direction | Description |
|---|---|---|---|
| x | double |
In | Independent variable |
| state | double* |
In | Array of state variable values |
| root_finder | RootFinder* |
In | Class for finding the roots of a function. |
| udata | void* |
In | A pointer to user_data. |
A function of type RootErrorFunc should:
- Specify a (math) function f(x) whose roots [x : f(x)=0] the RootFinder is meant to find.
- f(x) is usually a function of the state variables. State variables are themselves functions of x.
- Call
root_finder->find_roots(x, y), where y = f(x). If it returns 0.0, it's found a root of f(x). - Specify what to do as a result of finding a root.
- Return the value returned by
root_finder->find_roots().
Example RootErrorFunc from the Cannonball example
double impact( double t, double state[], RootFinder* root_finder, void* udata) {
double root_error = root_finder->find_roots(t, state[1]);
if (root_error == 0.0) {
root_finder->init();
state[2] = 0.9 * state[2];
state[3] = -0.9 * state[3];
}
return (root_error);
}
In this example :
- the independent variable is t.
- y = f(t) = state[1], that is the y (vertical) component of the cannonball position.
- When
root_finder->find_rootsreturns 0.0, then the result of finding the root (i.e, [t:state[1]=0]) is to "bounce" the cannon ball, by negating the y component of the velocity, and reducing the magnitude of the velocity by 10%.
class FirstOrderODEVariableStepIntegrator
Derived from FirstOrderODEIntegrator.
Description
This class represents a first order ODE integrator whose step-size can be varied.
Data Members
Those inherited from FirstOrderODEIntegrator plus:
| Member | Type | Access | Description |
|---|---|---|---|
| root_finder | RootFinder* |
Private | Pointer to a RootFinder object. |
| root_error_func | RootErrorFunc |
Private | Function that specifies what happens when a function-root is found. |
| last_h | double |
Protected | Value of h used in the last integration step. |
Constructor
Public Member Functions
void load()
Inherited from FirstOrderODEIntegrator::load()
void unload()
Inherited from FirstOrderODEIntegrator::unload()
void step()
Overrides FirstOrderODEIntegrator::step()
This function calls the virtual function variable_step() (below) with the default step-size. Then, if a RootFinder has been specified using add_Rootfinder() (below), search that interval for roots .
void integrate()
Inherited from Integrator::integrate()
double undo_integrate()
Overrides FirstOrderODEIntegrator::undo_integrate()
Call FirstOrderODEIntegrator::undo_integrate(), and then return last_h.
load_from_outState()
Inherited from FirstOrderODEIntegrator::load_from_outState()
set_in_vars()
Inherited from FirstOrderODEIntegrator::set_in_vars()
set_out_vars()
Inherited from FirstOrderODEIntegrator::set_out_vars()
virtual void variable_step( double h)
| Parameter | Type | Description |
|---|---|---|
| h | double |
Integration step-size that overrides the default step-size. |
Derived classes should override this method to calculate outState using some integration algorithm, given h, X_in, inState, and derivs_func. The over-riding method should also pass the user_data when calling the DerivsFunc.
void add_Rootfinder( RootFinder* root_finder, RootErrorFunc rfunc)
| Parameter | Type | Description |
|---|---|---|
| root_finder | RootFinder* |
RootFinder object. |
| rfunc | RootErrorFunc |
User supplied function whose purpose is to specify the job of a RootFinder. |
Configure the integrator to find roots of state-element vs. independent-variable functions.
double getIndyVar()
Inherited from Integrator::getIndyVar()
double setIndyVar()
Inherited from Integrator::setIndyVar()
Protected Member Functions
advanceIndyVar()
Inherited from Integrator::advanceIndyVar()
class EulerIntegrator
Derived from FirstOrderODEVariableStepIntegrator.
Description
The Euler method is a first order numerical integration method. It is the simplest, explicit Runge-Kutta method.
Data Members
Those inherited from FirstOrderODEVariableStepIntegrator.
Constructor
EulerIntegrator( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEVariableStepIntegrator.
Public Member Functions
- All of the Public Member Functions of FirstOrderODEVariableStepIntegrator, plus :
void variable_step( double h)
Overrides FirstOrderODEVariableStepIntegrator::variable_step()
Calculates outState from h, X_in, inState, and
derivs_func, using the Euler method.
class HeunsMethod
Derived from FirstOrderODEVariableStepIntegrator.
Description
This integrator implements Heun's Method.
Data Members
Those inherited from FirstOrderODEVariableStepIntegrator.
Constructor
HeunsMethod( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEIntegrator.
Public Member Functions
void variable_step( double h)
Overrides FirstOrderODEVariableStepIntegrator::variable_step()
Calculates outState from h, X_in, inState, and
derivs_func, using the Heun's method.
class RK2Integrator
Derived from FirstOrderODEVariableStepIntegrator.
Description
RK2Integrator implements the second order, explicit, Runge-Kutta method whose Butcher tableau is as follows.

Data Members
Those inherited from FirstOrderODEVariableStepIntegrator.
Constructor
RK2Integrator( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEIntegrator.
Public Member Functions
void variable_step( double h)
Overrides FirstOrderODEVariableStepIntegrator::variable_step()
Calculates outState from h, X_in, inState, and
derivs_func, using the Runge-Kutta 2 method.
class RK4Integrator
Derived from FirstOrderODEVariableStepIntegrator.
Description
RK4Integrator implements the fourth order, explicit, Runge-Kutta method whose Butcher tableau is as follows.

Data Members
Those inherited from FirstOrderODEVariableStepIntegrator.
Constructor
RK4Integrator( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEIntegrator.
Public Member Functions
void variable_step( double h)
Overrides FirstOrderODEVariableStepIntegrator::variable_step()
Calculates outState from h, X_in, inState, and
derivs_func, using the Runge-Kutta 4 method.
class RK3_8Integrator
Derived from FirstOrderODEVariableStepIntegrator.
Description
RK3_8Integrator implements the fourth order, explicit, Runge-Kutta method whose Butcher tableau is as follows.

Data Members
Those inherited from FirstOrderODEVariableStepIntegrator.
Constructor
RK3_8Integrator( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEIntegrator.
Public Member Functions
void variable_step( double h)
Overrides FirstOrderODEVariableStepIntegrator::variable_step()
Calculates outState from h, X_in, inState, and
derivs_func, using the Runge-Kutta 3/8 method.
class ABM2Integrator
Derived from FirstOrderODEIntegrator.
Description
The ABM2Integrator implements the second-order Adams-Bashforth-Moulton predictor/corrector method. Adams methods maintain a history of derivatives rather than calculating intermediate values like Runge-Kutta methods.
Data Members
Those inherited from FirstOrderODEIntegrator.
Constructor
ABM2Integrator ( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEIntegrator.
class ABM4Integrator
Derived from FirstOrderODEIntegrator.
Description
The ABM2Integrator implements the second-order Adams-Bashforth-Moulton predictor/corrector method. Adams methods maintain a history of derivatives rather than calculating intermediate values like Runge-Kutta methods.
Data Members
Those inherited from FirstOrderODEIntegrator.
Constructor
ABM4Integrator ( double h,
int N,
double* in_vars[],
double* out_vars[],
DerivsFunc func,
void* user_data)
Constructor Parameters are those of FirstOrderODEIntegrator.
class EulerCromerIntegrator
Derived from Integrator.
Description
EulerCromer is integration method that conserves energy in oscillatory systems better than Runge-Kutta. So, it's good for mass-spring-damper systems, and orbital systems.
Data Members
Those inherited from Integrator plus:
| Member | Type | Access | Description |
|---|---|---|---|
| nDimensions | unsigned int |
Protected | Number of dimensions in position, velocity, and acceleration vectors. Typically 1,2, or 3. |
| pos_p | double** |
Protected | Array of pointers to variables from which we load() and to which we unload() the position values . |
| vel_p | double** |
Protected | Array of pointers to variables from which we load() and to which we unload() the velocity values . |
| pos_in | double* |
Protected | Position input array. |
| vel_in | double* |
Protected | Velocity input array. |
| pos_out | double* |
Protected | Position output array. |
| vel_out | double* |
Protected | Velocity output array. |
| g_out | double* |
Protected | Array of accelerations returned from gderivs. |
| f_out | double* |
Protected | Array of velocities returned from fderivs. |
| gderivs | DerivsFunc |
Protected | A function that returns accelerations. |
| fderivs | DerivsFunc |
Protected | A function that returns velocities. |
Constructor
EulerCromerIntegrator(double dt,
int N,
double* xp[],
double* vp[],
DerivsFunc gfunc,
DerivsFunc ffunc,
void* user_data)
| Parameter | Type | Description |
|---|---|---|
| dt | double |
Default time step value. Sets Integrator::default_h. |
| N | int |
Sets nDimensions above. |
| xp | double* |
Sets pos_p above. |
| vp | double* |
Sets vel_p above. |
| gfunc | DerivsFunc |
Sets gderivs above. |
| ffunc | DerivsFunc |
Sets fderivs above. |
| user_data | void* |
Sets Integrator::user_data. |
Public Member Functions
void step( double dt)
| Parameter | Type | Description |
|---|---|---|
| dt | double |
Integration step-size that overrides the default step-size. |
This function calculates pos_out and vel_out from dt, X_in, pos_in, vel_in, f_func, and gfunc using the Euler-Cromer method.
void step()
This function calls step(dt) (above) with the default step-size.
void load()
Overrides Integrator::integrate() Load the integrator's initial state from the variables specified by xp, and vp. Set the initial value of the independent variable for the next step to the final value of the previous step.
void unload()
Overrides Integrator::integrate()
Unload the integrator's result state (pos_out, and vel_out) to the variables specified by xp, and vp.
void integrate()
Inherited from Integrator::integrate()
double undo_integrate()
Overrides Integrator::undo_integrate()
Undo the effect of the last integration step.
double getIndyVar()
Inherited from Integrator::getIndyVar()
double setIndyVar()
Inherited from Integrator::setIndyVar()
Protected Member Functions
advanceIndyVar()
Inherited from Integrator::advanceIndyVar()
enum SlopeConstraint
Description
| Value | Meaning |
|---|---|
| Negative | Require slope of the function to be negative at the root. |
| Unconstrained | No slope constraint. |
| Positive | Require slope of the function to be positive at the root. |
class RootFinder
Description
The RootFinder class uses the Regula-Falsi method to find roots of a math function. A root is a value of x such that f(x)=0.
Data Members
| Member | Type | Access | Description |
|---|---|---|---|
| f_upper | double |
Private | Error-function value upper bound. |
| x_upper | double |
Private | Independent variable value upper bound. |
| upper_set | bool |
Private | True = bound is valid. False = not valid. |
| f_lower | double |
Private | Error-function value lower bound. |
| x_lower | double |
Private | Independent variable value lower bound. |
| lower_set | bool |
Private | True = bound is valid. False = not valid. |
| prev_f_error | double |
Private | Absolute value of the previous root function value. |
| f_error_tol | double |
Private | How close is close enough. |
| iterations | int |
Private | Number of Regula Falsi iterations. |
| slope_constraint | SlopeConstraint |
Private | Find roots with this slope sign. |
| f_slope | SlopeConstraint |
Private | Current root function slope. |
Constructors
RootFinder()
Default constructor that calls void RootFinder::init() below.
RootFinder(double tolerance, SlopeConstraint constraint)
| Parameter | Type | Description |
|---|---|---|
| tolerance | double |
Error tolerance. |
| constraint | SlopeConstraint |
Public Member Functions
void init( double tolerance, SlopeConstraint constraint)
Initialize the RootFinder with the given tolerance, and SlopeConstraint.
void RootFinder::init()
Initialize the RootFinder with the method above with:
- tolerance =
0.00000000001 - slope_constraint =
Unconstrained
double find_roots( double x, double f_error )
- Returns DBL_MAX if no root is detected.
- Returns 0.0 if a root is detected, and the estimated error in f(x) is within tolerance.
- Returns an estimated correction in x if a root is detected, but the estimated error in f(x) is not within tolerance.