mirror of
https://github.com/nasa/trick.git
synced 2024-12-23 15:02:25 +00:00
2.7 KiB
2.7 KiB
SIM_wheelbot
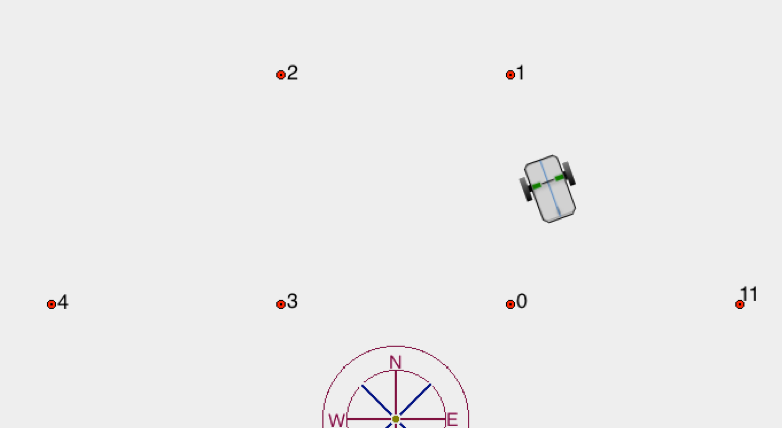
SIM_wheelbot is a simulation of a two-wheeled electric vehicle that follows a set of waypoints.
Building the Simulation
In the SIM_wheelbot directory, type trick-CP to build the simulation executable. When it's complete, you should see:
=== Simulation make complete ===
Now cd into models/Graphics/ and type make. This builds the display client for the simulation.
Running the Simulation
In the SIM_wheelbot directory:
% S_main_*.exe RUN_test/input.py
Inputs
| Variable | Type | Units | Default Value |
|---|---|---|---|
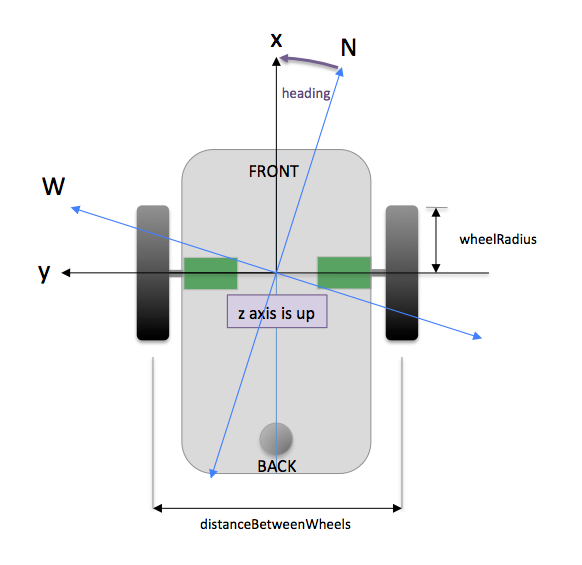
| veh.vehicle.distanceBetweenWheels | double | m | 0.183 |
| veh.vehicle.wheelRadius | double | m | 0.045 |
| veh.vehicle.wheelSpeedLimit | double | rad/s | 8.880 |
| veh.vehicle.headingRateLimit | double | rad/s | 𝛑/4 |
| veh.vehicle.wheelDragConstant | double | -- | 1.875 |
| veh.vehicle.corningStiffness | double | -- | 10.0 |
| veh.vehicle.slowDownDistance | double | -- | 0.5 |
| veh.vehicle.arrivalDistance | double | -- | 0.1 |
Adding Waypoints
Waypoints, for the vehicle to follow, are added with a call to
veh.vehicle.add_waypoint( double N, double W )
Adding Home point
A home point is designated by the last waypoint in the waypoint file.
Input/Output
| Variable | Type | Units |
|---|---|---|
| veh.vehicle.position | double[2] | m |
| veh.vehicle.velocity | double[2] | m |
| veh.vehicle.heading | double | rad |
| veh.vehicle.headingRate | double | rad |
Outputs
| Variable | Type | Units |
|---|---|---|
| veh.vehicle.acceleration | double[2] | m |
| veh.vehicle.headingAccel | double | rad |
| veh.vehicle.driveForce | double[2] | N |
| veh.vehicle.lateralTireForce | double[2] | N |
| veh.vehicle.rollingResistForce | double[2] | N |
| veh.vehicle.forceTotal | double[2] | N |
| veh.vehicle.vehicleZTorque | double | N*m |