|
|
||
|---|---|---|
| .. | ||
| images | ||
| include | ||
| src | ||
| README.md | ||
class PIDController
Constructor
PIDController::PIDController(
double kp, // proportional gain
double ki, // integral gain
double kd, // derivative gain
double omax, // limiter maximum
double omin, // limiter minimum
double dt, // sample period
double tc // filter time constant
);
For no filtering, set tc to the value of dt. To filter, set tc a value higher than dt.
double PIDController::getOutput( double setpoint_value,
double measured_value);
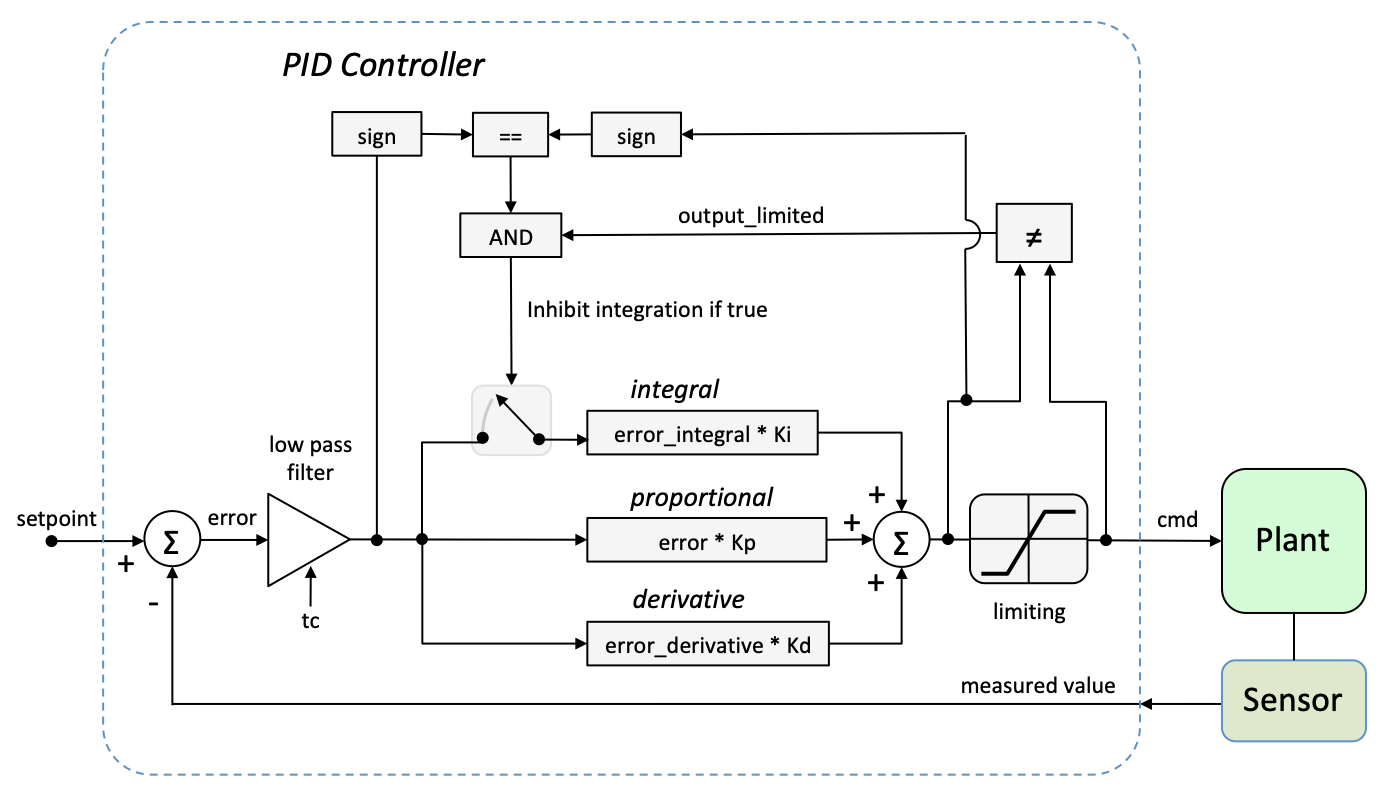
This function generates the control command (corresponding to cmd in the above diagram.) for the plant. The "plant" is the thing that you are controlling.
For example, the plant could be a lunar lander. The measured value could be altitude, and the command could be motor thrust. The setpoint is the what you want the output of the plant to be. The setpoint could be an altitude of 100 feet. The measured_value is the actual output (the actual altitude) of the lander plus perhaps some noise (because sensors aren't perfect).
References
The following videos provide some excellent instruction about PID control:
Understanding PID Control, Part 1: What is PID Control?
Understanding PID Control, Part 2: Expanding Beyond a Simple Integral
Understanding PID Control, Part 3: Part 3: Expanding Beyond a Simple Derivative