mirror of
https://github.com/nasa/trick.git
synced 2024-12-22 14:32:24 +00:00
| .. | ||
| images | ||
| models | ||
| Modified_data | ||
| RUN_test | ||
| README.md | ||
| S_define | ||
| S_overrides.mk | ||
SIM_lander
SIM_lander simulates a lunar lander, with manual and automatic controls.
Building the Simulation
In the SIM_lander directory, type trick-CP to build the simulation executable. When it's complete, you should see:
=== Simulation make complete ===
Now cd into models/graphics/ and type make. This builds the display client for the simulation.
Running the Simulation
In the SIM_lander directory:
% S_main_*.exe RUN_test/input.py
The Sim Control Panel, and a GUI called "Lander Range" should appear.
Click the Start on the Trick Sim Control Panel.
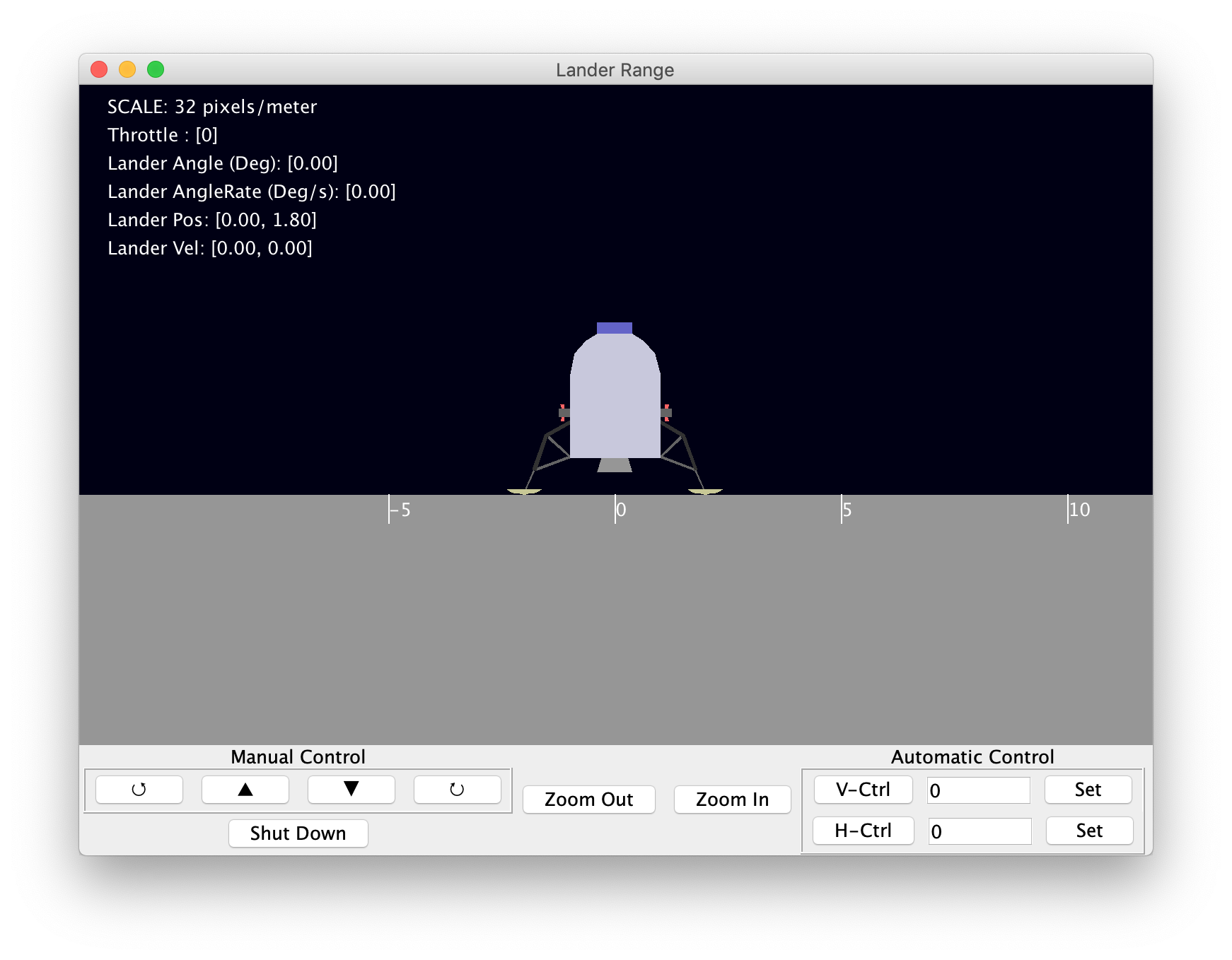
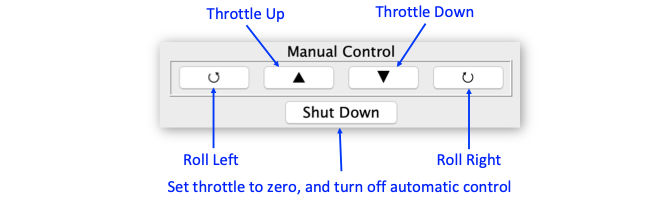
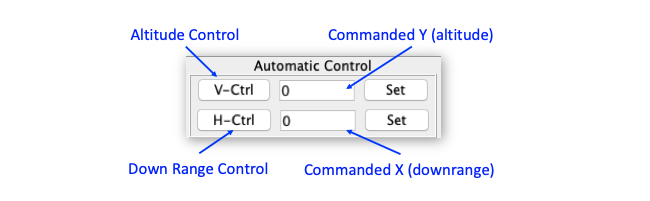
Using the controls shown below have fun!
Initial Conditions
To set the initial state of the lander, edit the following variables in the input file.
| Variable | Type | Units |
|---|---|---|
| dyn.lander.pos | double[2] | m |
| dyn.lander.vel | double[2] | m |
| dyn.lander.angle | double | rad |
| dyn.lander.angleDot | double | rad/s |