Aircraft Simulation
SIM_aircraft is a 2-dimensional aircraft simulation. It uses the forces of engine thrust, and aerodynamic drag, and a turning force, as described in the following pages to compute the position and velocity of an aircraft.
Simplifications
The simulated aircraft moves on a map, but not in altitude.
In this simulation, we’ll assume that the aircraft always points in the direction of flight. In the aircraft body coordinates, thrust is directed in the +x direction and drag in the –x direction.
Control In this simulation, we can manually control the aircraft by specifying:
- a desired speed
- a desired heading.
or automatically.
Building the Simulation
In the SIM_aircrafte directory, type trick-CP to build the simulation executable. When it's complete, you should see:
=== Simulation make complete ===
Now cd into models/graphics/ and type make. This builds the graphics client for the simulation.
Running the Simulation
In the SIM_aircraft directory:
% S_main_*.exe RUN_test/input.py
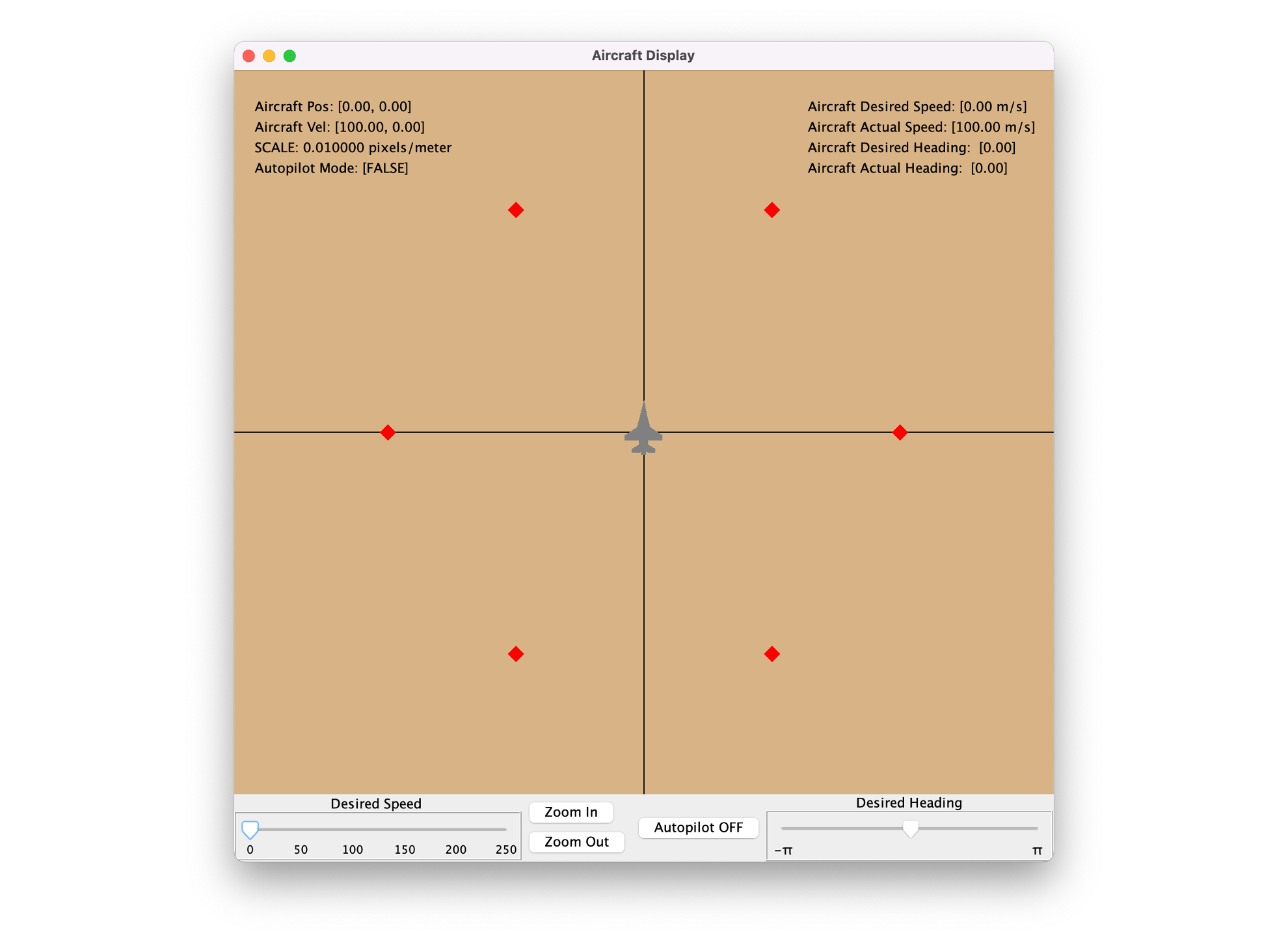
The Sim Control Panel, and a graphics client called "Aircraft Display" should appear.
Click Start on the Trick Sim Control Panel.
q
Dynamics Model
General Strategy for Motion
To determine the motion of an object we generally start with Newton’s Second Law: F = ma That is, force equals mass times acceleration.
This allows us to determine the rates that effect motion, that is: acceleration and velocity. Solving for acceleration, we get : a = F/m.
This is the form of Newton’s Law that we generally use. So, if we have a force acting on a mass, we can determine its acceleration. Then, we can then numerically integrate that acceleration to get velocity and then integrate the velocity to get position.
Total Force and Acceleration
To calculate acceleration, we’ll use Newton’s Second Law as usual. The force is the total force acting on the aircraft.

The total force on our aircraft is the sum of:
- the thrust force produced by the aircraft’s engine and
- the drag force produced by the aircraft pushing through the atmosphere.
- the turning force, dictated by gravity and the desired turning rate.

If we affix a “Body” coordinate system to the aircraft as shown, then the thrust force will act in the +x direction, and the drag force in the –x direction. That is, thrust and drag that point in opposite directions.

Drag Force
The magnitude of the drag force is proportional to the square of the aircraft’s speed. We’ll call our constant of proportionality K_{drag} .

By “speed”, we mean the magnitude of the velocity :

Thrust Force
The magnitude of the thrust force produced by our engine can be anywhere between 0 and some value that we specify as the maximum ( thrust_{MAX} ). For our aircraft.
We said in the beginning that we want to control our aircraft by setting a “desired speed”. The amount of thrust produced obviously determines the speed. So, how much thrust do we need to reach and maintain a desired speed?
- To increase speed, we must accelerate, in which case magnitude of the thrust must be greater than that of the drag.
- To maintain the same speed acceleration must be zero, in which case the thrust and drag magnitudes must be equal.
- To decrease speed, we must decelerate, in which case thrust magnitude must be less than that of drag.
Therefore, the thrust we require to reach and maintain a desired speed must be the same magnitude as the drag force at that desired speed.

If our engine can produce the desired thrust, then we can set the throttle to produce that thrust ( thrust_{actual} ) and we’ll speed up to that speed. But what if we can’t? The most thrust we can produce is thrust_{MAX} , when we’re at full throttle.
So, we must limit thrust_{actual} to that which our engine can actually produce :


So, the magnitude of the thrust force vector is thrust_{actual} , and the direction is [1,0] in Body coordinates.
Aircraft Heading
If the aircraft is moving directly north, \psi = 0 . Directly west is \pi/2 . Directly east is -\pi/2 .

Heading Control
To control our heading, we’d like to calculate a heading rate that is proportional to the difference between our current heading and our desired heading.


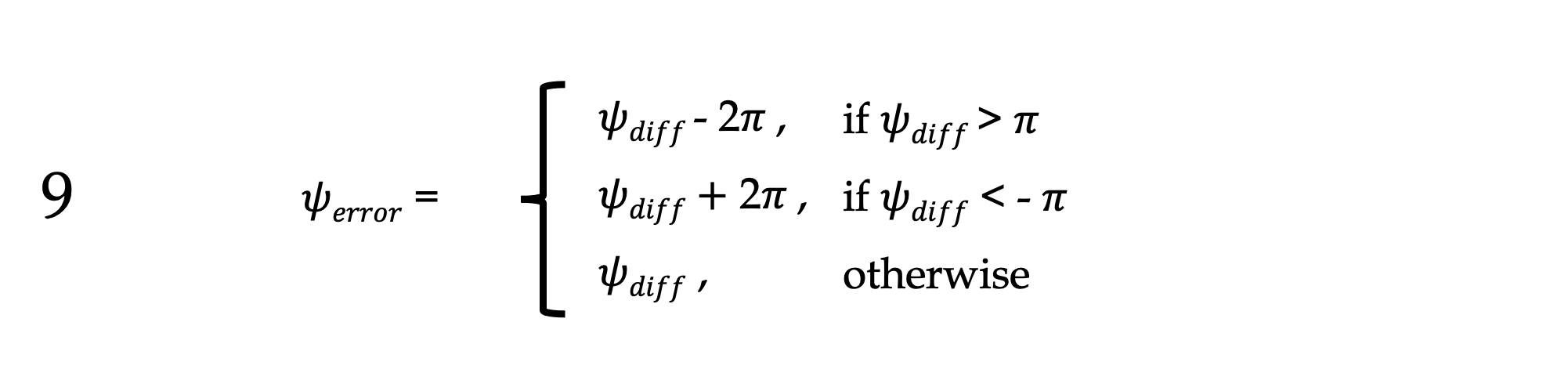
Notice (in the figure) that \psi_{diff} is in the direction that we want to turn. But, what if ( \left| \psi_{diff} \right| > \pi )? That is, it’s greater than 180 degrees?
Do you ever have to turn more than 𝜋 radians (180 degrees) to face any direction? No, you don’t.
Let’s now define \pis_{error} as the actual direction of turning.
This is how we will calculate our desired heading rate:

That is, our desired heading rate is proportional to the amount and direction that we need to turn.
G_{\psi} is a proportionality constant.
Turning Force
The turning force we needed to turn the desired rate is :

Like our desired speed, just we want something doesn’t mean that the aircraft is capable of it. In our case we need to limit the magnitude of our force to 1 G ( force of gravity), that is 9.8 m/s2 * m. So if our mass is 5000 kg, we need to limit our turning force to between -49000 .. 49000 Newtons.
But we need that total force in world coordinates so we can move our aircraft around in the world. So, if our heading of our aircraft is 𝜓, what is our direction vector expressed in world coordinates?
