SIM_MSD
SIM_MSD is a simulator for a mass-spring-damper system.
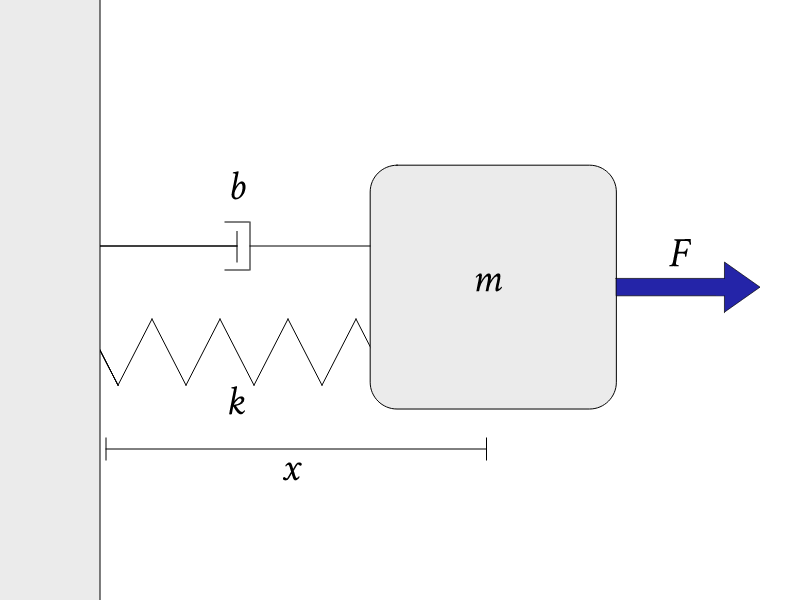
The system is described by the equation mẍ + bẋ + kx = F, where:
m is the mass of an object.
x is the position of the mass.
b is the damping coefficient.
k is the spring coefficient.
F is an external force applied to the mass.
Building the Simulation
In the SIM_MSD directory, execute trick-CP to build the simulation executable. When it's complete, you should see:
=== Simulation make complete ===
Now cd into models/Graphics/ and type make. This builds the display client for the simulation.
Running the Simulation
In the SIM_MSD directory:
% ./S_main_*.exe RUN_test/input.py
The following windows should appear:
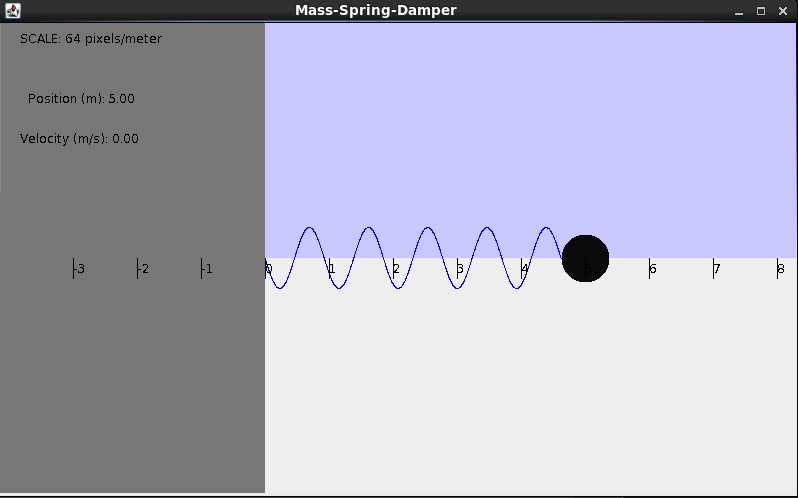
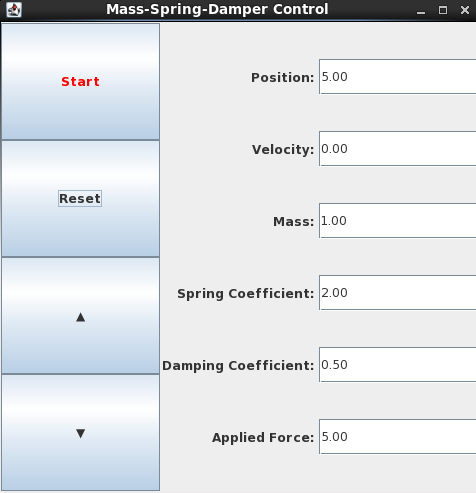
Controlling the Simulation
Click Start to begin the simulation.
Click Reset to freeze the simulation and reset the position and velocity to their initial conditions.
Change Position and Velocity to adjust the initial conditions for those attributes.
Change Mass, Spring Coefficient, Damping Coefficient, and Applied Force to adjust initial conditions and also update the sim in real-time.
The following inputs can be set in any of the RUN_*/input.py files to change the inputs on startup
Inputs
| Variable | Type | Units | Default Value |
|---|---|---|---|
| dyn.msd.x_0 | double | m | 5.0 |
| dyn.msd.v_0 | double | m/s | 0.0 |
| dyn.msd.b | double | N.s/m | 0.5 |
| dyn.msd.k | double | N/m | 2.0 |
| dyn.msd.F | double | N | 5.0 |
| dyn.msd.m | double | kg | 1.0 |
Some sample input.py files have been created to demonstrate different mass-spring-damper conditions
Samples
| Path | Type |
|---|---|
| RUN_underdamp/input.py | Underdamped Harmonic Oscillator |
| RUN_critdamp/input.py | Critically Damped Harmonic Oscillator |
| RUN_overdamp/input.py | Overdamped Harmonic Oscillator |
| RUN_nodamp/input.py | Simple Harmonic Oscillator (No Damping Force) |