mirror of
https://github.com/nasa/trick.git
synced 2024-12-18 20:57:55 +00:00
* Disable unneeded SimObjects from default_trick_sys.sm in Trick example sims. * Take out unit test disable. Add some S_defines I forgot. |
||
|---|---|---|
| .. | ||
| images | ||
| models | ||
| Modified_data | ||
| RUN_ball_line | ||
| RUN_multi_collision | ||
| RUN_Newtons_cradle | ||
| RUN_pool_break | ||
| RUN_simple_collision | ||
| RUN_test5 | ||
| README.md | ||
| S_define | ||
| S_overrides.mk | ||
SIM_contact
SIM_contact simulates the motion, and the collisions of any arbitrary numbers of moving balls.
Each ball is defined by a position, velocity, radius, and mass.
Collisions are purely elastic. In addition to conserving momentum, they also conserve kinetic energy.
A graphics client allows you to see the balls in motion:
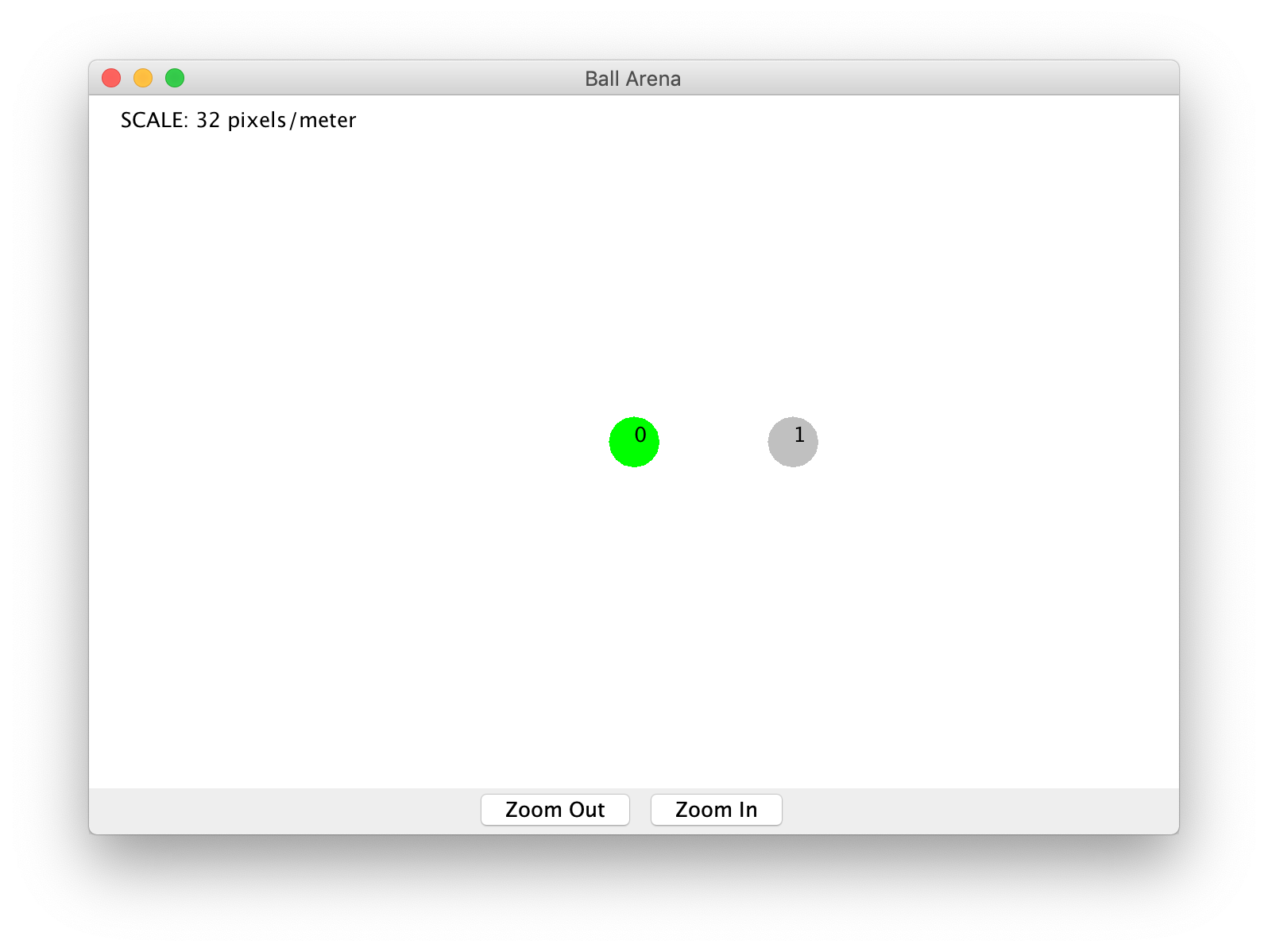
Examples
The configuration for the above display is:
dyn.contact.nballs = 2
dyn.contact.balls = trick.TMM_declare_var_1d("Ball*", dyn.contact.nballs)
dyn.contact.balls[0] = trick.make_Ball(0.0, 0.0, 0.5, 0.0, 0.5, 1.0)
dyn.contact.balls[1] = trick.make_Ball(3.0, 0.0, -0.5, 0.0, 0.5, 1.0)
The initial state of the first ball is pos=<0.0, 0.0>, vel=<0.5,0.0>, radius=0.5, and mass=1.0.
The initial state of the second ball is pos=<3.0, 0.0>, vel=<-0.5,0.0>, radius=0.5, and mass=1.0.